大氣衰減(在所有天氣條件下)、空氣中粒子的散射以及目標表面的反射率都與波長有關。由于有各種各樣可能的天氣條件和反射表面,對于這些條件下汽車激光雷達波長的選擇來說是一個復雜的問題。在大多數實際情況下,905 nm處的光損失更小,因為在1550 nm處的水分的吸收率比905 nm處要大。1
光探測器的選擇

只有一小部分脈沖發射的光子可以到達光電探測器的有效區域。如果大氣衰減沿脈沖路徑不變化,激光光束發散度可忽略不計,光斑尺寸小于目標,入射角垂直于探測器且反射體是朗伯體(所有方向均反射),則光接收峰值功率P(R)為:
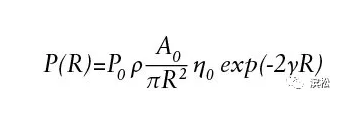
P0是發射激光脈沖的光峰值功率,ρ是目標的反射率,A0是接收器孔徑面積,η0是光學系統透過率,γ是大氣消光系數。
該方程表明,隨著距離R的增加,接收功率迅速減小。為了合理選擇參數,R=100 m,探測器的活動區域上返回光子的數量大約是幾百到幾千,而通常發射的光子超過1012。這些回波光子與背景光子同時被探測,而背景光子沒有任何有用信息。
采用窄帶濾波器可以減少到達探測器的背景光,但不能減少到零,背景光的影響使檢測動態范圍減小,噪聲(背景光子拍攝噪聲)增大。值得注意的是,典型條件下地面太陽輻照度在1550 nm處小于905 nm。
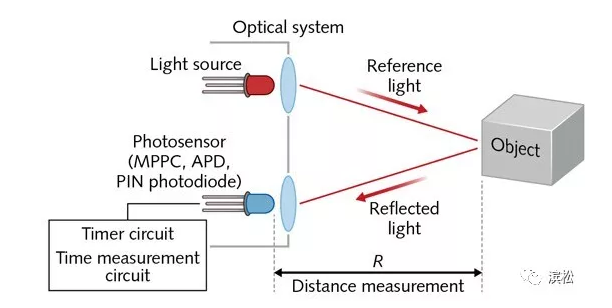
飛行時間(ToF)激光雷達的基本原理示意
在一輛汽車周圍360°×20°的區域內創建一張完整的3D地圖需要一束經過光柵分光后進行掃描,或多束激光束掃描,再或者將光束整個覆蓋住需要的范圍并收集返回的點云數據。前者被稱為掃描(scanning)激光雷達,后者稱為閃光(flash)激光雷達。
掃描激光雷達有幾種方式。第一種方式,以Velodyne為例(San Jose, CA),在頂部安裝激光雷達平臺,該雷達以300~900 rpm的速度旋轉并發射出64路905 nm激光的脈沖。每束光束都有一個對應的雪崩光電二極管(APD)探測器。較類似的另一方法是使用旋轉的多面鏡,每個面的傾斜角度略有不同,從而以不同的方位角和斜角引導反射單個脈沖光束。這兩種設計中的機械運動部件都有外部駕駛環境惡劣時的故障風險。
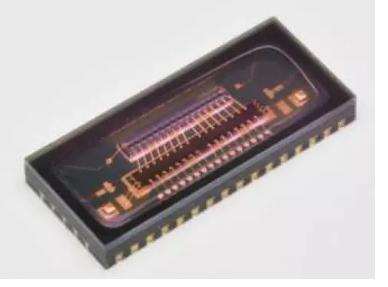
濱松新型百米級自動駕駛激光雷達探測器
16ch 硅APD S14137-01CR
第二種更緊湊的掃描激光雷達,其方法是使用一個微型微機電系統(MEMS)振鏡,以二維的方向電引導出一束或多束光束。雖然在技術上仍然有運動部件(振蕩鏡),但振蕩的幅度很小,頻率也很高,足以防止MEMS振鏡和汽車之間的機械共振。然而,振鏡的幾何尺寸限制了它的振蕩幅度,這就使得視角變得有限——這是MEMS方法的一個缺點。然而,這種方法由于成本低、可實現度高而受到人們的關注。
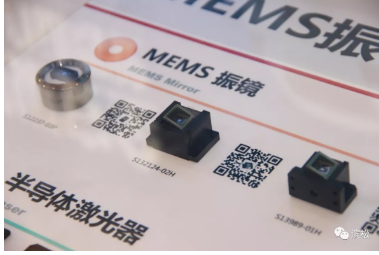
濱松最新MEMS Mirror產品
剛剛在慕尼黑上海光博會中展出
光學相控陣列(OPA)技術,是第三種參與競爭的激光雷達技術,它以可靠的“固定部件”設計而日益流行。它由相干光照明的光學天線組成的陣列構成。光束轉向是通過獨立地控制每個單元發光時的相位和振幅來實現,從而于遠場處干涉產生理想照明方向,實現從單光束到多光束的變化。不幸的是,光的損失限制了各種OPA組件的可用范圍。
閃光激光雷達將目標場景中充滿光,而照明區域與探測器的視場相匹配。探測器是探測光學焦平面上的APDs陣列。每個APD獨立測量其上圖像目標特征的ToF。這是一種真正的“不移動部件”的方法,其中切線方向(垂直、水平)分辨率受到二維探測器像素尺寸的限制。
然而,閃光激光雷達的主要缺點是回波光子數量:一旦距離超過數十米,返回光的數量就太少,無法進行可靠的探測。如果不是直接用光覆蓋所有探測環境而是采用結構光的形式(例如點陣形式),且犧牲一定的切線分辨率,則可以提高回波光強度。此外,垂直腔面發射激光器(VCSELs)使得在不同方向同時發射數千束光束的出射成為可能。
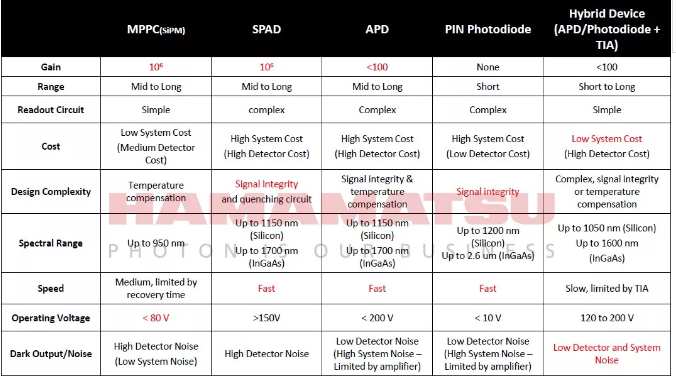
濱松可用于激光雷達的光半導體探測器對比
報告:面向自動駕駛Lidar的核心半導體器件介紹
擺脫ToF法的限制
ToF激光雷達由于其回波脈沖較弱、探測部分電子學設計的寬帶較寬而容易受到噪聲的影響,而閾值觸發則會產生Δt的測量誤差。因此,調頻連續波(FMCW)激光雷達是一種很有意義的替代方法。
在FMCW雷達或啁啾調制雷達中,天線連續發射頻率被調制的無線電波。例如,隨著時間T從?0線性增加到?max,然后隨著T從?max線性減小至?0。如果波在一定距離內的移動物體上反射回發射點,其瞬時頻率將與該瞬間發射的無線電波不同。這一差別由兩個因素導致:到物體的距離及其相對徑向速度。可以通過電子測量方法得到頻差,同時計算物體的距離和速度(見下圖)。
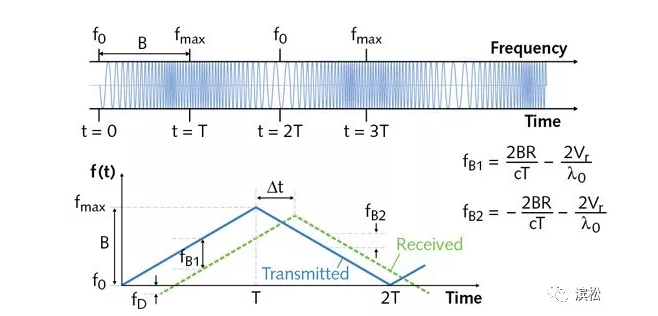
在啁啾雷達中,通過電子測量fB1和fB2,可以確定與反射目標的距離及其徑向速度。
在啁啾雷達的啟發下,FMCW激光雷達可以通過不同的方式獲得。在最簡單的設計中,人們可以啁啾地調節照亮目標的光強。這個頻率受FMCW雷達載波頻率的相同規律(例如多普勒效應)的影響,返回的光被光探測器探測到并恢復調制頻率,輸出被放大并與本身振蕩頻率混頻從而允許測量頻移,并由此計算出目標的距離及其速度。
但是FMCW激光雷達有一定的局限性,與ToF激光雷達相比,它需要更多的計算能力,因此在生成全三維環繞圖時速度較慢,而且測量精度對啁啾時調制時的線性度程度非常敏感。
雖然設計一種功能完善的激光雷達系統具有挑戰性,但這些挑戰都不是不可克服的。隨著研究的繼續,我們越來越接近于大多數汽車生產結束后就能夠完全自動化的時代。
“一些新能源汽車前頂會凸起一塊,里面裝載的就是用于智能駕駛的激光雷達。但未來這樣制約汽車美觀度設計的凸起將消失,因為我們研制的新款調頻連續波(FMCW)激光雷達身材纖細輕巧,可以支持后視鏡、車燈等多種......
記者近日從西安理工大學獲悉,該校激光雷達科研團隊在斜程能見度測量技術上取得突破。他們提出了一種激光雷達結合輻射傳輸模式的方法,突破了目前的斜程能見度測量技術瓶頸,實現了精確測量。相關成果刊發在《光學學......
美國眾議院中國事務特別委員會的議員敦促拜登政府調查中國激光雷達行業,并決定將哪些公司列入政府限制實體清單。激光雷達技術是一種遙感技術,被廣泛應用于自主系統和機器人技術,包括無人機和自動駕駛汽車。立法者......
北京大學電子學院王興軍教授課題組-常林研究員課題組在兩年攻關的基礎上,研制出一種全新的硅基片上多通道混沌光源,提出了一種基于混沌光梳的并行激光雷達架構,攻克了激光雷達抗干擾和高精度并行探測這兩個世界性......
北京大學電子學院王興軍教授課題組-常林研究員課題組在兩年攻關的基礎上,研制出一種全新的硅基片上多通道混沌光源,提出了一種基于混沌光梳的并行激光雷達架構,攻克了激光雷達抗干擾和高精度并行探測這兩個世界性......
繼芯片之后,激光雷達成為汽車產業鏈的又一熱門詞匯。2月6日和7日,激光雷達企業速騰聚創先后對外宣布,獲得一汽豐田和賽力斯量產訂單。這是國產激光雷達首次進入以嚴格、精細著稱的豐田供應鏈體系。此前,頭部激......
本周,一家新的激光雷達巨頭正式誕生。當地時間2月13日,激光雷達制造商Ouster和Velodyne表示,雙方已經成功完成了“對等合并”(mergerofequals),此次合并于2月10日生效,公司......
全球知名市場研究與戰略咨詢公司YoleIntelligence近期發布了《2022年汽車與工業領域激光雷達報告》。報告稱,中國在全球汽車激光雷達市場中處于領先地位,來自中國的供應商成為這一領域的佼佼者......
從中國科學技術大學獲悉,該校地球和空間科學學院教授薛向輝團隊在相干測風激光雷達系統研制方面取得重大突破,首次實現空間分辨率3米、時間分辨率0.1秒的風場探測。據悉,這是迄今為止有報道的全球最高精度的風......
美國激光雷達公司來特斯拉挖寶了!4月21日周三,由于從特斯拉(TSLA.US)和英特爾(INTC.US)分別挖角到高管,美國激光雷達公司LuminarTechnologies(LAZR.us)股價盤中......